


요약
4차 산업혁명 시대에 지능형 로봇의 중요성이 증가하면서 도심 순찰 로봇의 효율적인 경로 계획이 필수적입니다. 전통적인 A 스타 알고리즘은 고정된 장애물이 있는 환경에서는 유용하지만, 실시간 상황에 대한 유동적 대응이 어렵다는 한계가 있습니다. 본 기술은 경매 이론, 특히 Second Price Auction(SPA)을 적용하여 도심 순찰 로봇의 경로 계획 문제를 해결하고자 합니다. 센서 데이터를 활용하여 각 순찰 지역의 위험도를 평가하고, 이를 기반으로 응찰가를 산정하여 경로를 계획합니다. SPA 이론 덕분에 거짓 응찰을 방지하고, 신뢰성 있는 동적 경로를 생성할 수 있습니다. 이로 인해 도심 순찰 로봇은 위험 요소에 유연하게 대응하며, 도시의 안전도를 높이고 로봇의 운영 효율성을 극대화할 수 있습니다.
기본 정보
•
특허명: 경매 이론을 기반으로 광역 경로를 생성하는 도심 순찰 로봇 및 방법
•
발명자: 강창묵 교수
•
출원번호: 10-2021-0193890
•
등록번호: 10-2674307
상세 정보
발명의 배경과 필요성
기술의 배경과 문제점
•
지능형 로봇의 중요성이 4차 산업혁명 시대에 급격히 증가하고 있음. 특히, 로봇이 실제로 경로를 계획하여 이동하는 기술은 매우 중요함.
•
전통적인 경로 계획 알고리즘으로는 A 스타 알고리즘이 주로 사용됨. 이는 게임 분야에서 많이 활용되며, 고정된 장애물이 있는 환경에 적합함.
•
그러나 A 스타 알고리즘은 거리값을 기반으로 경로를 계산하므로 실시간 상황에 유동적으로 대응하기 어렵다는 문제점이 있음.
•
이로 인해 도심 순찰 로봇이 보다 효율적으로 경로를 계획하고 위험 요소를 피하기 위해 새로운 접근 방법이 필요함.
기술의 필요성
•
기존 경로 탐색 알고리즘의 한계를 극복하고 실시간으로 변화하는 도시 환경에 유연하게 대응할 수 있는 경로 계획 기술이 요구됨.
•
도심 순찰 로봇이 순찰 지역의 위험도를 평가하고 필요한 순찰 우선순위를 동적으로 결정하는 기능이 필요함.
•
이러한 기능은 도시의 안전도를 높이고 로봇의 효율적인 운영을 가능하게 하며, 이를 위해 경매 이론을 적용한 새로운 경로 계획 방법이 연구되고 있음.
구현 방법
기술의 원리
•
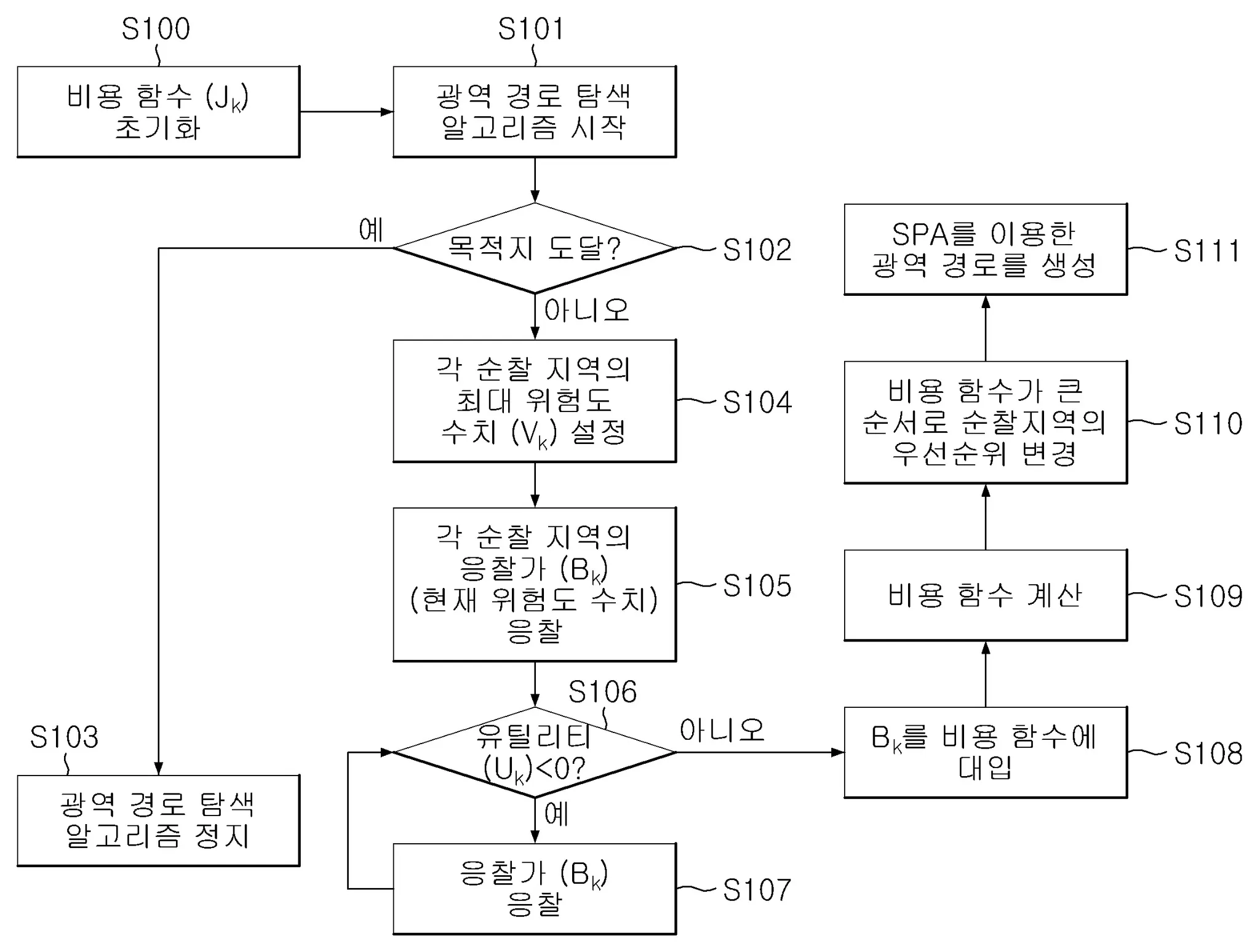
본 발명은 도심 순찰 로봇의 경로 계획에 경매 이론을 적용하여 순찰 지역의 위험도를 응찰가로 정의함. 응찰가에 따라 위험 순위를 정하고, 이에 기반한 광역 경로를 생성함.
•
경매 이론 중에서도 'Second Price Auction(SPA)' 이론을 적용하여 거짓 응찰을 방지하고, 이로 인해 신뢰성 있는 동적 경로를 생성함.
•
순찰 지역의 위험도는 센서 데이터와 사전에 정의된 위험 요소를 기반으로 산출됨.
구체적인 구현 방법
•
도심 순찰 로봇에 외부 센서를 부착하여 데이터를 실시간으로 수집하고, 수집된 데이터를 바탕으로 격자 지도를 생성함.
•
격자 지도에서 각 순찰 지역을 위험도로 평가하고, 응찰가를 계산함. 이 응찰가는 각 순찰 지역의 위험도를 나타냄.
•
SPA 이론을 기반으로 순찰 지역 간 경매를 진행하여 순찰 우선 순위를 결정함. 이후, 순찰 로봇은 이 순위를 바탕으로 자율적으로 이동함.
•
장애물을 피하기 위해 근거리 및 원거리 장애물을 감지하는 주행 제어 시스템을 갖추고 있음.
기술의 장점
•
경매 이론을 적용하여 동적인 순찰 경로를 생성하고, 실시간으로 변화하는 위험 요소에 유연하게 대응할 수 있음.
•
거짓 응찰을 방지하기 위해 SPA 이론을 활용하여 인공지능 기반의 신뢰성 높은 경로 계획이 가능함.
•
도시의 안전을 증가시키고 로봇의 운영 효율성을 극대화할 수 있음.
시장 동향
지능형 로봇 시장 동향
경로 계획 알고리즘
도심 순찰 로봇
대표도면
인천대학교 산학협력단
(21999) 인천광역시 연수구 갯벌로 27(송도동) INU이노베이션센터 202호
본 메일은 마케팅 활용 동의서에 동의하신 회원님께 전송된 것입니다.
COPYRIGHT (c) 2026 Incheon National University. ALL RIGHT RESERVED.