
.png&blockId=14669776-8cf2-43e6-9bae-62980e19c177)

요약
본 발명은 복수의 전극에서 측정된 표면 근전위와 고유 벡터 분해 방법을 기반으로 독립적인 근육 단위의 전기적 신호를 구분하는 기술을 제안합니다. 이를 통해 로봇 장치의 안정적인 제어 입력을 가능하게 하며, 로봇 공학 및 재활 공학 분야에서의 활용성을 높입니다. 실험 결과, 표면 근전위 인터페이스 장치의 조정 방법이 가장 정확한 토크 추정 결과를 제공함을 확인하였습니다. 이 기술은 장애인이나 노약자의 생활 편의성을 증진시키는데 크게 기여할 것으로 기대됩니다.
기본 정보
•
특허명: 사용자-로봇 인터페이스를 위한 표면 근전위 기반 인터페이스 장치 및 그 동작 방법
•
대표 발명자: 장한뜻 교수
•
출원번호: 10-2022-0160648
발명의 배경 및 필요성
기술 배경과 문제점
•
표면 근전위는 근육 활성도 수준을 나타내고 관절 토크를 추정하는 데 사용할 수 있는 비침습적 방법으로, 인공 기관이나 외골격 슈트 제어, 임상 생체 역학, 인체 공학 평가 등 다양한 분야에서 연구되고 있음
•
그러나 표면 근전위를 발생시키는 복잡한 생체 기전으로 인해 표면 근전위와 관절 토크 추정의 변동성이 발생하며, 이로 인해 표면 근전위가 로봇 장치의 안정적인 제어 입력으로 사용되는 것은 어려움
•
또한, 표면 근전위의 신호 분석에서 해부학적 근육의 개수와 독립적인 전기 신호의 개수가 일치하지 않는 것을 확인하였음
기술 개선의 필요성
•
이 문제를 해결하기 위해 복수의 표면 근전위 특징점들을 활용하는 방법들과 다양한 신호 처리 기법이 제안되어 있지만, 이러한 기존의 방법들은 신호 대 잡음비를 높이기 위한 저역 통과 필터링 알고리즘을 사용한 교정 방법 등이 있음
•
그러나 이 방법들은 SNR과 응답 시간 사이에 높은 트레이드 오프가 존재하며, 이로 인해 로봇 장치의 제어 입력으로 활용될 때 불안정하고 성능이 낮아지는 문제가 있음
•
이를 개선하기 위해 본 발명은 복수의 전극에서 측정된 표면 근전위와 고유 벡터 분해 방법을 기반으로 독립적인 근육 단위의 전기적 신호를 구분하는 기술을 제안하고 있음
구현방법
기술의 원리 및 구현
•
이 장치는 근육의 움직임을 전기 신호로 바꾸는 전극을 사용하여 근육의 활동을 파악하며, 이 신호는 근육의 활동이 증가할수록 크기가 커짐.
•
장치는 통신부, 메모리, 프로세서로 구성되며, 각각이 정보의 주고받음, 분석, 저장 등의 역할을 수행함.
•
장치는 로봇에 설치되어 사용될 수 있고, 네트워크를 통해 다른 장치와 정보를 주고받음.
•
여러 개의 전극을 사용하여 근전위 신호를 측정하고, 이를 바탕으로 근육의 활동을 분석함. 전극의 위치에 따라 측정되는 신호의 크기가 달라질 수 있으므로, 각 전극이 독립적으로 작동하도록 설계함.
•
이 기술은 컴퓨터 프로그램으로 구현될 수 있음.
기술의 장점
•
근육의 활동을 정확하게 파악하고 이를 제어 신호로 바꾸는 기술을 제공함.
•
로봇 등의 외부 장치를 신속하고 정확하게 제어할 수 있음.
•
자동화 기술의 발전에 따라 활용 가능한 분야가 다양해짐.
실험 및 결과
실험의 목적 및 방법
•
근육의 활동을 파악하고 이를 제어 신호로 바꾸는 방법을 검증하는 것을 목표로 함.
•
피험자가 팔을 굽히는 힘인 '토크'를 재현하는 것이 검증 과정의 일부임.
•
15명의 참가자를 대상으로 실험을 진행하였으며, 원하는 움직임을 생성하도록 권장하였음.
•
근전위 신호를 측정하고, 이를 바탕으로 근육의 활동을 분석하였음. 토크는 이전 단계에서 얻은 계수를 사용하여 추정되었음.
실험 결과
•
근전위 신호의 표준편차와 근력 사이에는 일반적으로 비선형적인 비례 관계가 있음을 확인했음.
•
표면 근전위 인터페이스 장치의 조정 방법이 가장 정확한 토크 추정 결과를 제공함을 확인했음.
•
근육 활성도 수준에 따른 채널 간의 상관 관계를 계산한 실험 결과로 뒷받침됨.
발명의 활용 방안
로봇 및 재활 장치 제어
•
본 발명은 표면 근전위 신호를 이용해 심부 근육을 포함한 각 근육 단위의 활성도를 독립적으로 추정하고, 이를 바탕으로 로봇 및 재활 장치의 제어 입력 신호를 생성함
•
리스케일링 방식의 선형화 알고리즘을 활용해 정확한 토크 추정 결과를 도출, 이를 통해 로봇의 빠르고 정확한 제어 입력 신호를 생성함
기대효과
기술적 혁신과 사회적 가치
•
근육 활성도를 실시간으로 정확하게 추정하고 이를 바탕으로 정확하고 빠른 제어 입력 신호를 생성, 로봇 장치의 안정적인 제어를 가능하게 하는 기술적 혁신을 달성함
•
여러 전극에서 획득된 표면 근전위 신호의 공간 데이터를 기반으로 통계적 신호 처리를 수행, 응답 지연 없이 빠르고 정확한 제어 입력 신호를 생성함
•
로봇 공학 및 재활 공학 분야에서 로봇 장치의 제어신호의 생성 및 입력이 가능하게 함으로써 사회적 가치를 창출함
•
16개의 전극에서 표면근전위 신호를 획득하여 근육 활성도를 추정, 이를 바탕으로 로봇 장치의 제어신호를 생성하여 장애인이나 노약자의 편의성 증진에 기여함
장래의 비전
•
본 발명이 적용된 로봇 장치는 장애인이나 노약자의 생활 편의성을 증진시키는데 크게 기여할 것으로 기대됨
•
이를 통해 더 나은 사회를 만드는데 기여하며, 로봇 공학 및 재활 공학 분야의 기술 발전을 촉진함
시장 동향
로봇공학 시장 동향
재활공학 시장 동향
기술 SWOT 분석
Strengths
근육 활동의 정확한 파악
•
근육의 움직임을 전기 신호로 바꾸는 전극을 사용하여 근육의 활동을 정확하게 파악하고, 이를 제어 신호로 바꾸는 기술을 제공합니다.
로봇 등의 외부 장치 신속 정확 제어
•
로봇 등의 외부 장치를 신속하고 정확하게 제어할 수 있습니다.
다양한 활용 가능성
•
자동화 기술의 발전에 따라 활용 가능한 분야가 다양해집니다.
Weaknesses
신호 대 잡음비의 트레이드 오프
•
신호 대 잡음비를 높이기 위한 저역 통과 필터링 알고리즘을 사용한 교정 방법 등이 있지만, 이 방법들은 SNR과 응답 시간 사이에 높은 트레이드 오프가 존재합니다.
Opportunities
로봇 및 재활 장치 제어
•
본 발명은 표면 근전위 신호를 이용해 심부 근육을 포함한 각 근육 단위의 활성도를 독립적으로 추정하고, 이를 바탕으로 로봇 및 재활 장치의 제어 입력 신호를 생성합니다.
Threats
기술의 복잡성
•
본 기술은 복수의 전극에서 측정된 표면 근전위와 고유 벡터 분해 방법을 기반으로 독립적인 근육 단위의 전기적 신호를 구분하는 복잡한 기술입니다. 이로 인해 기술의 이해와 적용에 어려움이 있을 수 있습니다.
Summary
Strengths
•
근육의 활동을 정확하게 파악하고 이를 제어 신호로 바꾸는 기술을 제공하며, 로봇 등의 외부 장치를 신속하고 정확하게 제어할 수 있습니다. 또한, 자동화 기술의 발전에 따라 활용 가능한 분야가 다양해집니다.
Weaknesses
•
신호 대 잡음비를 높이기 위한 저역 통과 필터링 알고리즘을 사용한 교정 방법 등이 있지만, 이 방법들은 SNR과 응답 시간 사이에 높은 트레이드 오프가 존재합니다.
Opportunities
•
본 발명은 표면 근전위 신호를 이용해 심부 근육을 포함한 각 근육 단위의 활성도를 독립적으로 추정하고, 이를 바탕으로 로봇 및 재활 장치의 제어 입력 신호를 생성합니다.
Threats
•
본 기술은 복수의 전극에서 측정된 표면 근전위와 고유 벡터 분해 방법을 기반으로 독립적인 근육 단위의 전기적 신호를 구분하는 복잡한 기술입니다. 이로 인해 기술의 이해와 적용에 어려움이 있을 수 있습니다.
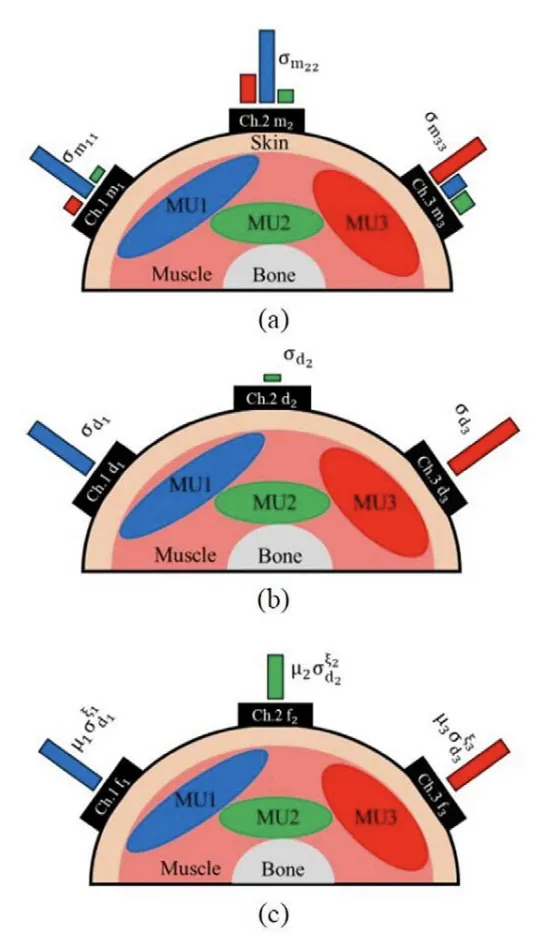
대표도면
인천대학교 산학협력단
(21999) 인천광역시 연수구 갯벌로 27(송도동) INU이노베이션센터 202호
본 메일은 마케팅 활용 동의서에 동의하신 회원님께 전송된 것입니다.
COPYRIGHT (c) 2023 Incheon National University. ALL RIGHT RESERVED.